
CZSL 超像素增强复现与优化实战:从视觉纠缠到多尺度融合
项目仓库:https://github.com/GongyiChuren/czsl-Superpixel
1. 问题背景:为什么 CZSL 在视觉上容易“纠缠”
组合零样本学习(Compositional Zero-Shot Learning, CZSL)的目标是:
- 训练阶段只见过部分属性-物体组合;
- 测试阶段要识别未见过的新组合(如训练见过
red apple和blue car,测试要识别red car)。
这要求模型学到“可组合”的表示,即属性和物体要能在特征空间中相对解耦。
实际困难在于,常规 CNN 往往偏向纹理统计,面对噪声/复杂背景时容易把无关纹理当作判别依据,导致:
- 结构信息(轮廓、局部几何)被淹没;
- 属性和物体表征互相污染;
- 未见组合泛化能力下降。
我在这个项目中的思路是:先复现超像素增强(SVFE)作为结构先验,再优化成多尺度融合,改善“去噪 vs 细节保留”的矛盾。
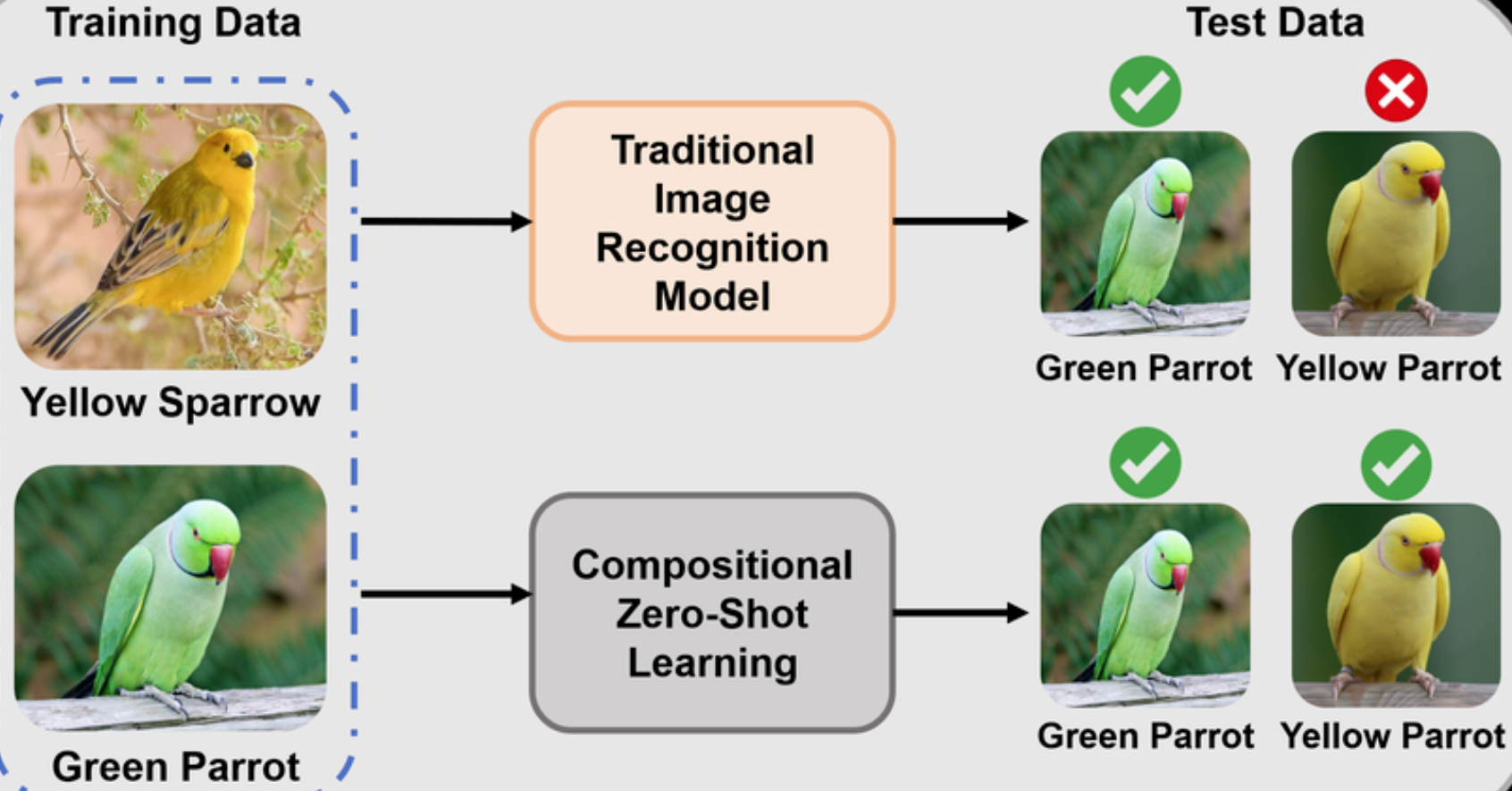
Figure 1. 视觉纠缠问题定义:纹理干扰会破坏属性-物体解耦。
2. 复现部分:Superpixel-based Visual Feature Enhancement
复现核心代码在:czsl-Superpixel-code/czsl-Superpixel-based/superpixel_module.py
2.1 从像素到超像素区域
给定图像特征图(这里先以图像 RGB 演示,后续可替换为中间层特征)
用 SLIC 得到超像素分区:
其中 是超像素数量, 表示第 个区域的像素集合。
2.1.1 SLIC 本身的推导
SLIC(Simple Linear Iterative Clustering)可以看成在 5 维空间做局部约束的 k-means [3]。对每个像素 ,定义:
其中 是 Lab 颜色空间, 是像素坐标。
对于第 个超像素中心:
定义颜色距离和空间距离:
SLIC 的归一化距离:
其中:
- 是网格步长( 为像素总数, 为超像素数);
- 是紧致度参数(compactness),控制“颜色一致性”和“空间紧致性”的权衡。
在这个定义下,SLIC 迭代等价于最小化如下目标:
优化过程与 k-means 一致,分两步交替:
- 分配步(Assignment):对像素分配最近中心
- 更新步(Update):按当前簇均值更新中心
由于每个中心只在局部窗口(约 )内搜索,而不是全局搜索,SLIC 复杂度接近线性,且分块边界通常贴合图像结构,这也是它适合做超像素先验的原因。
2.1.2 参数到底在控制什么(结合我的实验)
PPT 里我反复强调两个参数:n_segments 和 compactness。这两个参数不是“随便调”,它们直接决定模型看到的信息形态。
n_segments(分块数)- 小:每块更大,更像“强平滑”,抗噪好,但容易吃掉细节;
- 大:每块更小,细节保留更好,但也更容易把噪声留住。
compactness(紧致度,对应上面的 )- 小:更偏颜色一致性,边界更贴物体真实轮廓;
- 大:更偏空间规整,块会更“圆/方”,但可能跨越真实边界。
我在 demo 和实验中看到的现象是:
n_segments=100时分块很粗,适合看整体结构;n_segments=1000时边界明显更贴局部轮廓;- 继续增大分块数时,细节会更完整,但抗噪能力会下降。
这正是后面做多尺度融合的动机:单一尺度很难同时满足“结构稳定”和“细节保真”。
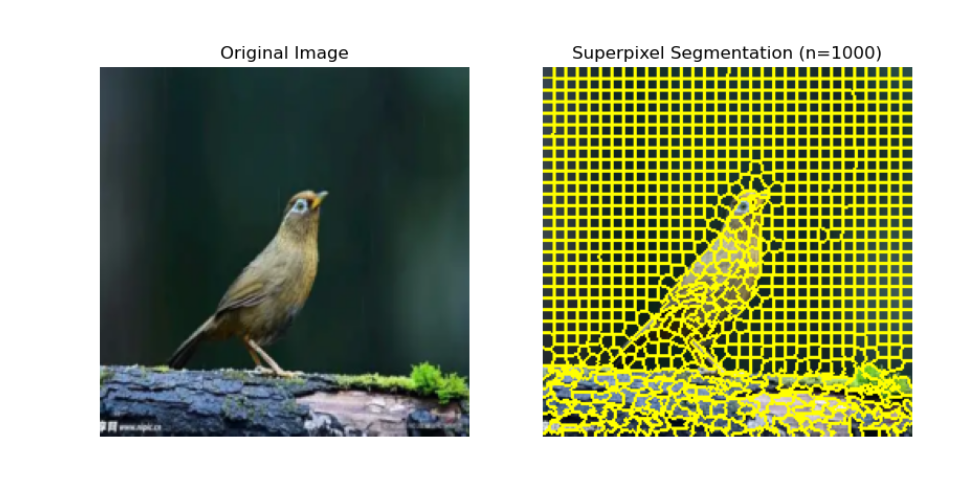
Figure 2. 超像素 Demo:分割粒度会直接影响抗噪和轮廓保持。
2.2 区域聚合公式推导
区域级表示定义为区域内均值池化:
把所有区域拼接得到:
它可以理解为一种结构约束下的降噪:区域内高频噪声在均值时被抵消,而同一区域的稳定语义被保留。
2.3 为什么这种聚合有效
假设像素特征可以写成:
其中 是有用语义信号, 是零均值噪声,且同一区域内噪声近似独立。则:
第二项方差大致按 缩小,所以聚合后表示更稳定。这就是超像素增强能提升鲁棒性的统计基础。
3. 优化部分:多尺度融合(V2)
优化代码在:czsl-Superpixel-code/czsl-Superpixel-based/V2.py
单尺度复现方法有一个典型 trade-off:
- 区域太大:去噪强,但细节被抹平;
- 区域太小:细节保留好,但抗噪弱。
3.1 双路特征构建
我采用两个尺度并行(与 PPT 中的 V2 一致):
- 粗尺度(结构层):
n_segments=1500,强调轮廓稳定与去噪; - 细尺度(纹理层):
n_segments=6000,保留边缘和纹理细节。
记两路输出为:
融合输出:
当前实验使用固定权重(实现里是 0.5/0.5),后续可以把 改成可学习参数或门控函数。
这里的直觉可以写得更“工程化”一点:
- 粗尺度输出像一个稳定的低频底座;
- 细尺度输出像高频补偿;
- 融合就是“先稳住,再补细节”。
3.2 为什么多尺度更合理
从偏差-方差视角看:
- 粗尺度降低方差(抗噪);
- 细尺度降低偏差(保细节);
- 线性融合可在两者之间找平衡。
因此在复杂场景下,V2 往往比 V1 更稳。
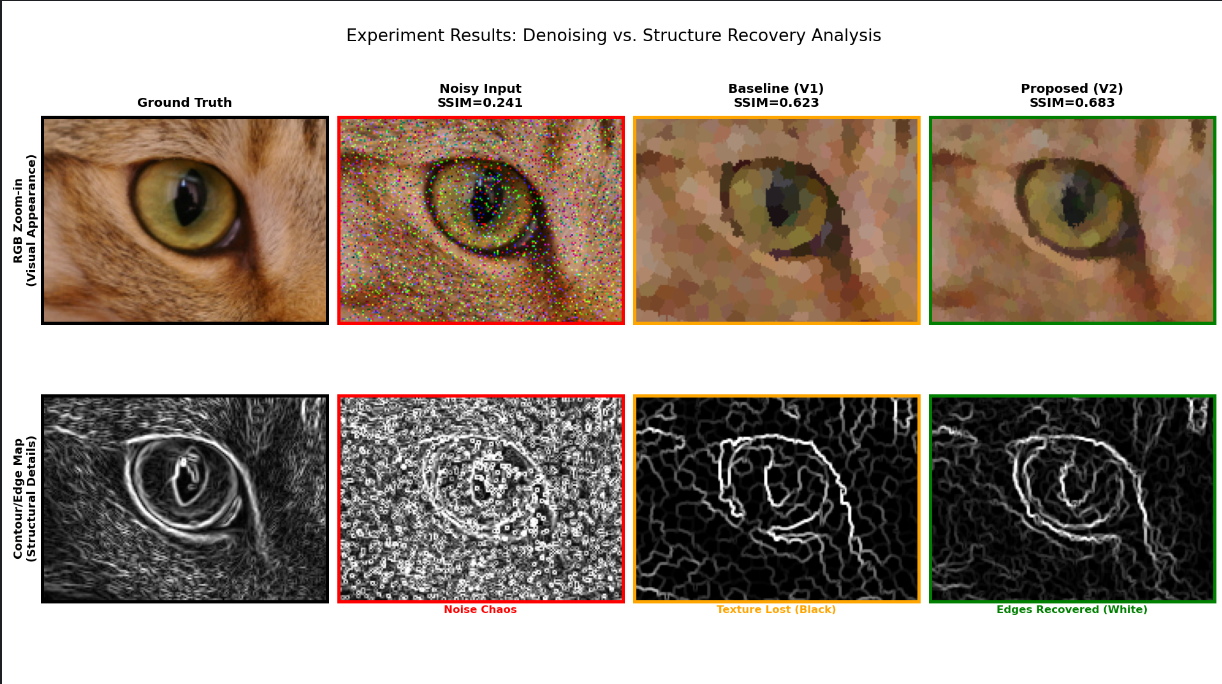
Figure 3. V2 多尺度融合:粗尺度去噪,细尺度保边缘,SSIM 提升。
4. 实验设计与指标
4.0 先踩的坑:ResNet 分类分数并不能直接证明改进
我一开始用 ResNet50 分类误差来验证“图像是否更好识别”,结果出现了反直觉现象:
- Baseline(噪声图)误差约
29.1 - Ours(超像素修复图)误差约
75.5
这并不代表方法失败,而是揭示了 ResNet 的纹理偏置 [2]:
- 超像素处理本质上会压低高频纹理;
- ResNet 在很多场景恰恰高度依赖纹理;
- 所以“结构更好”不等于“ResNet 分类分更高”。
因此我在 PPT 里把评估切换到结构指标 SSIM,并辅以边缘响应和 t-SNE 可视化,这样更符合 CZSL 关注的“结构可组合性”。
| 探索 I:ResNet 误差反直觉 | 探索 II:SSIM 成功验证 |
|---|---|
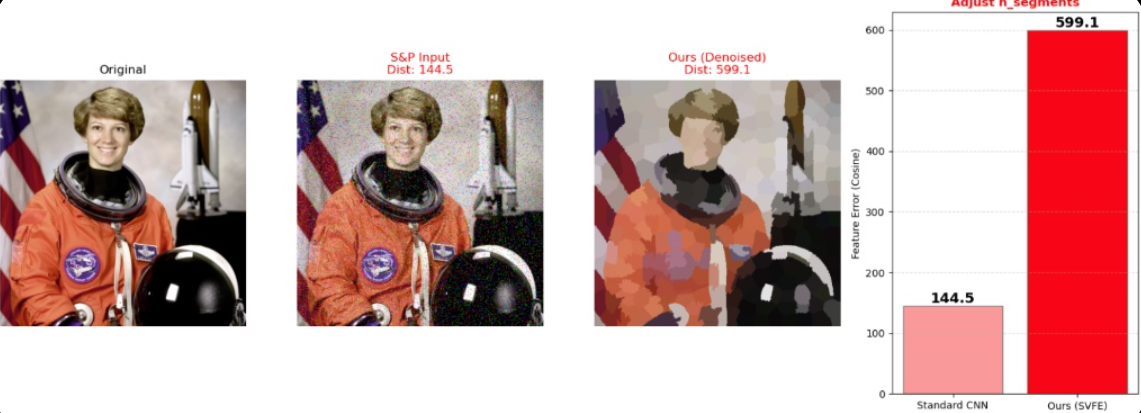 | 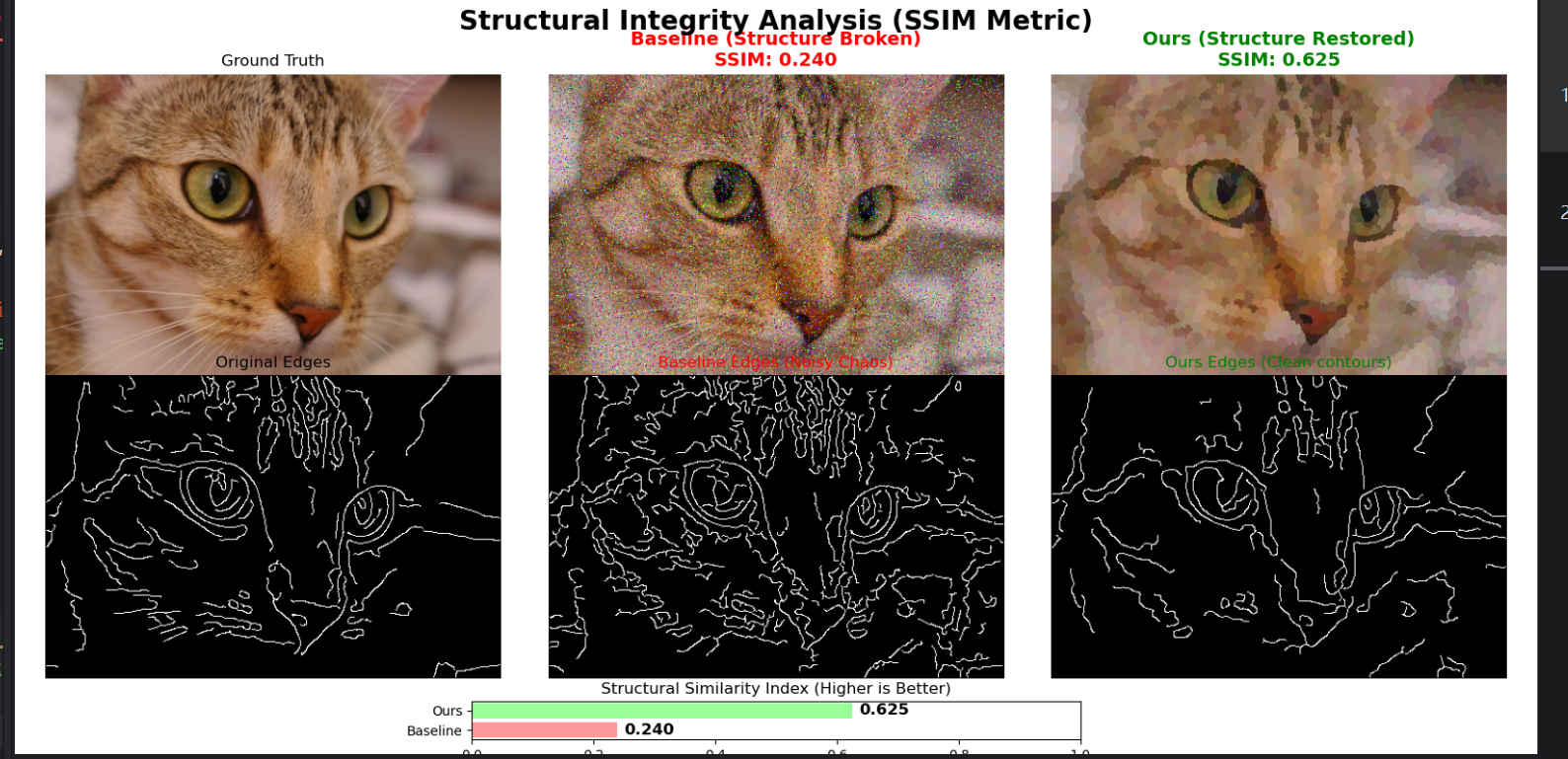 |
Figure 4. 评估路径切换:分类分数不稳定,结构指标更贴合目标。
4.1 噪声鲁棒性实验
脚本:czsl-Superpixel-code/czsl-Superpixel-based/Noise_Robustness.py
流程:
- 构造高强度椒盐噪声输入;
- 分别用 Baseline(V1)和 Ours(V2)处理;
- 计算与干净图的结构相似性 SSIM;
- 辅助可视化边缘图(结构恢复证据)。
SSIM 定义:
其中 为均值, 为方差, 为协方差。SSIM 越高,结构保真度越好。
4.2 判别性实验(相似类别 + 强干扰)
脚本:czsl-Superpixel-code/czsl-Superpixel-based/t_SNE_Experiment.py
设置要点:
- 选择容易混淆的相似类别(Cat/Deer/Dog);
- 施加强噪声扰动;
- 比较 Baseline 与 Ours 的特征分布;
- 用 t-SNE 观察类间可分性与类内紧致性。
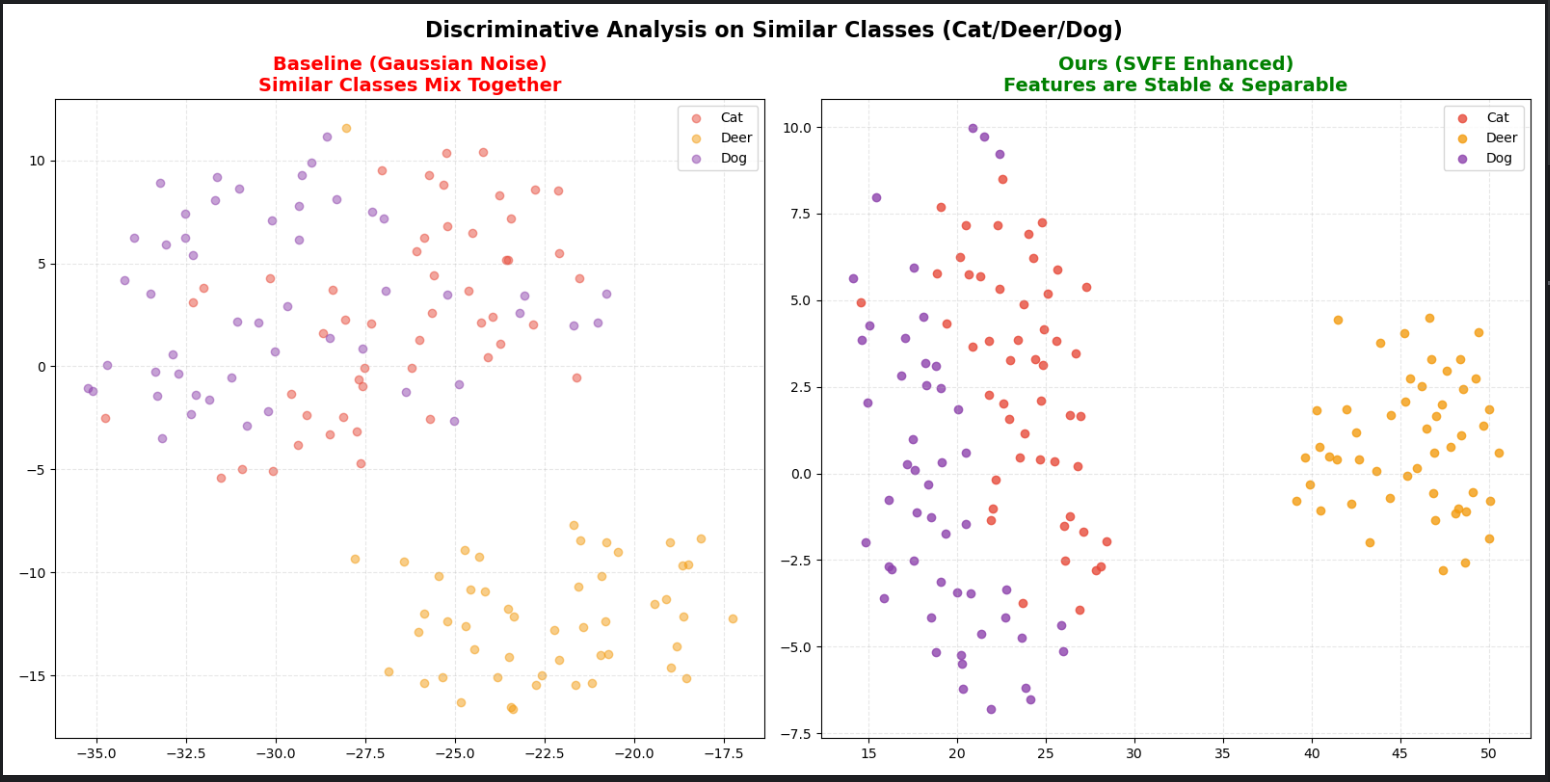
Figure 5. t-SNE 可分性验证:强噪声下 Ours 仍保持更清晰簇分离。
4.3 实验环境与数据集
- 数据集 1:MIT-States,约
53,753张图像,115个属性,背景复杂,适合验证前景/背景分离能力; - 数据集 2:UT-Zappos(文中也写作 Zappos),约
50,025张图像,鞋类细粒度差异明显,适合验证细微材质识别。
工程配置方面,本地实验环境使用 RTX Laptop GPU(8GB 显存)进行复现与验证;训练流程由 flags.py、train.py、test.py 管理。
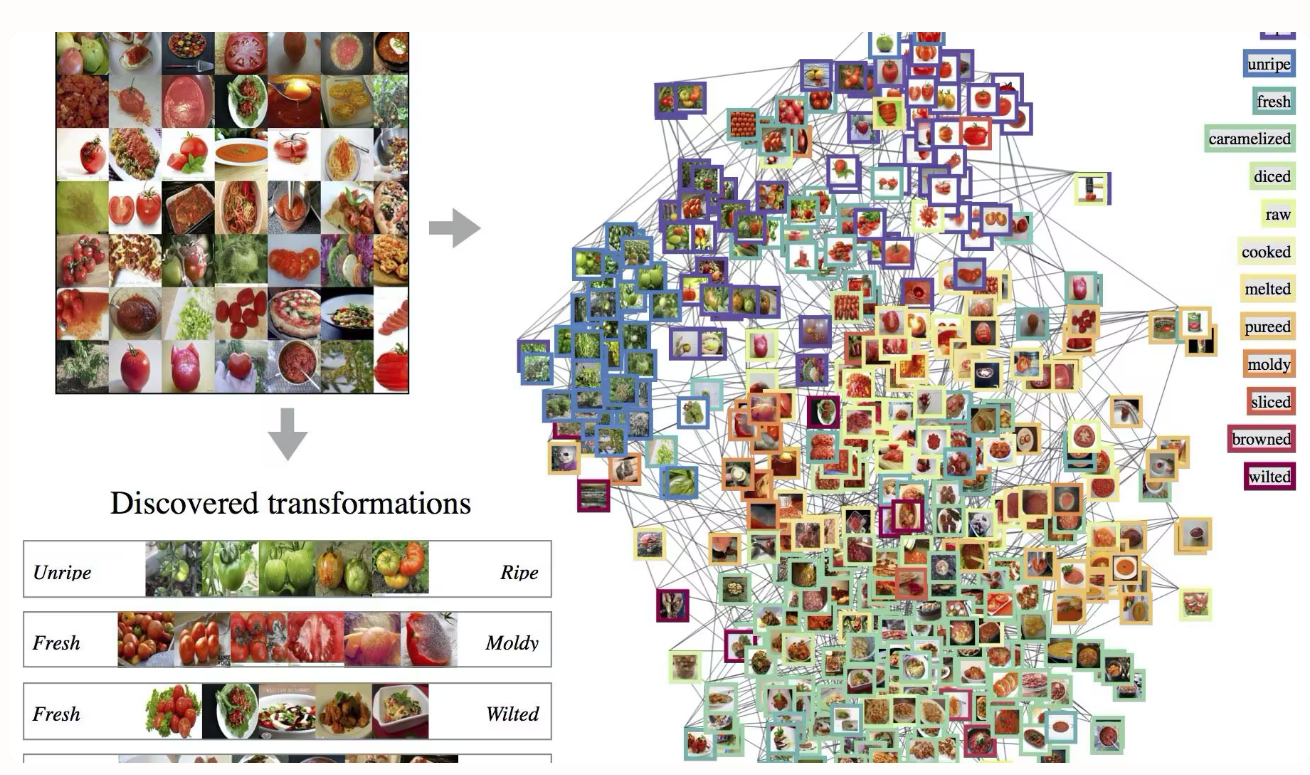
Figure 6. 数据集与任务挑战概览。
5. 关键结论
- 复现有效:超像素区域聚合确实能缓解噪声导致的结构破坏。
- 优化有效:多尺度融合在 SSIM 和可视化上都优于单尺度基线(
0.625 -> 0.683)。 - 机制合理:粗细双路分别承担抗噪和保细节角色,符合统计与表示学习直觉。
6. 还能怎么继续做
下一步我准备沿这几条线继续推进:
- 把融合权重从常数升级为可学习门控;
- 将多尺度模块更深地接入完整 CZSL 训练管线,做标准 benchmark 对比;
- 增加更多噪声类型和跨数据域验证,评估泛化稳定性。
7. 相关文件索引
- 详细文字说明:
report.docx - 汇报版图文:
ppt_report.pptx - 复现核心:
czsl-Superpixel-code/czsl-Superpixel-based/superpixel_module.py - 优化实验:
czsl-Superpixel-code/czsl-Superpixel-based/V2.py - 鲁棒性验证:
czsl-Superpixel-code/czsl-Superpixel-based/Noise_Robustness.py - 判别性可视化:
czsl-Superpixel-code/czsl-Superpixel-based/t_SNE_Experiment.py
如果你也在做“复现 + 改进”类课程项目,欢迎直接参考这个结构:先做可运行复现,再做单点优化,再用定量指标和可视化双重验证,最后写成可复查的技术闭环。
8. 参考文献
[1] Du, W., Bao, X., Xu, X., et al. (2026). Superpixel-based Visual Feature Enhancement for Compositional Zero-Shot Learning. Information Processing and Management.
[2] He, K., Zhang, X., Ren, S., & Sun, J. (2016). Deep Residual Learning for Image Recognition. CVPR.
[3] Achanta, R., et al. (2012). SLIC Superpixels Compared to State-of-the-Art Superpixel Methods. IEEE TPAMI.
文章分享
如果这篇文章对你有帮助,欢迎分享给更多人!